
Immersion - Fpv - Émetteurs - Antennes etc
3 participants
Visitez aussi notre site: https://aathiers.jimdofree.com :: Au sommet :: Technique,Electronique,Montages,Astuces
Page 1 sur 1

Immersion - Fpv - Émetteurs - Antennes etc
par JPierre Lun 10 Déc - 9:52
Je vais essayer de faire part de mon expérience d'immersion (et demander celle des autres) afin de conserver la trace de nos recherches, hésitations, erreurs (peu nombreuses  ).
).
Voici 1 an le m'a offert des lunettes FATSHARK Dominator V3 : superbe cadeau
m'a offert des lunettes FATSHARK Dominator V3 : superbe cadeau  que j'ai alors décidé d'utiliser.
que j'ai alors décidé d'utiliser.
Mais avec quel avion ?
un Elektro Trainer (l'avion de début d'Alexandre) , une aile volante etc ...
mon choix s'est fixé sur le EasyStar Multiplex dont j'avais une épave à réparer !
dont j'avais une épave à réparer !
La caméra ?
Michel m'a conseillé une Runcam Swift 2 qu'il avait essayé (en version 1) et apprécié. A noter que cette caméra permet d'obtenir un modeste OSD (On Screen Display).
qu'il avait essayé (en version 1) et apprécié. A noter que cette caméra permet d'obtenir un modeste OSD (On Screen Display).
L'émetteur ?
J'ai choisi le TX801 de chez Eachine : Conseillé par Gilles ce petit émetteur est intéressant pour son prix mais aussi, comme je ne savais pas vraiment ce qui m'attendait j'ai préféré choisir un composant dont la gamme de fréquences et de puissances était assez large pour permettre toute sorte d'ajustements. (Rappel de la loi française Pmax émission = 25 mW)
de chez Eachine : Conseillé par Gilles ce petit émetteur est intéressant pour son prix mais aussi, comme je ne savais pas vraiment ce qui m'attendait j'ai préféré choisir un composant dont la gamme de fréquences et de puissances était assez large pour permettre toute sorte d'ajustements. (Rappel de la loi française Pmax émission = 25 mW)
Voici un petit supplément avec le schéma de montage
La caméra supporte de 5 à 36V ; comme l'émetteur fabrique du 5V j'ai utilisé cette possibilité.
Michel, Gilles et tous les autres sont sollicités pour parler de leur expérience d'immersion dans ce forum
La suite viendra bientôt, elle comportera un schéma de l'installation électronique avec GPS et OSD (sérieux car bichonné par le président) et la façon de tout mettre en oeuvre.
J'attends vos commentaires
Voici 1 an le
que j'ai alors décidé d'utiliser.Mais avec quel avion ?
un Elektro Trainer (l'avion de début d'Alexandre) , une aile volante etc ...
mon choix s'est fixé sur le EasyStar Multiplex
dont j'avais une épave à réparer !La caméra ?
Michel m'a conseillé une Runcam Swift 2
 qu'il avait essayé (en version 1) et apprécié. A noter que cette caméra permet d'obtenir un modeste OSD (On Screen Display).
qu'il avait essayé (en version 1) et apprécié. A noter que cette caméra permet d'obtenir un modeste OSD (On Screen Display). L'émetteur ?
J'ai choisi le TX801
de chez Eachine : Conseillé par Gilles ce petit émetteur est intéressant pour son prix mais aussi, comme je ne savais pas vraiment ce qui m'attendait j'ai préféré choisir un composant dont la gamme de fréquences et de puissances était assez large pour permettre toute sorte d'ajustements. (Rappel de la loi française Pmax émission = 25 mW)Voici un petit supplément avec le schéma de montage
La caméra supporte de 5 à 36V ; comme l'émetteur fabrique du 5V j'ai utilisé cette possibilité.
Michel, Gilles et tous les autres sont sollicités pour parler de leur expérience d'immersion dans ce forum
La suite viendra bientôt, elle comportera un schéma de l'installation électronique avec GPS et OSD (sérieux car bichonné par le président) et la façon de tout mettre en oeuvre.
J'attends vos commentaires
JPierre- Messages : 13
Date d'inscription : 04/12/2018
Re: Immersion - Fpv - Émetteurs - Antennes etc
par Tijernas Mer 12 Déc - 8:15
Bonjour Jean-Pierre,
Merci pour ton post.Je garde le schéma sous le coude car il n’est pas exclu que j’installe une caméra sur
mon f450 .Tu sais que je n’aime pas utiliser mon Phantom pour des vols courants.
Par contre,comme je ne me fais pas aux lunettes FPV,la réception se fera sur écran.
FPV quand même ????
Merci pour ton post.Je garde le schéma sous le coude car il n’est pas exclu que j’installe une caméra sur
mon f450 .Tu sais que je n’aime pas utiliser mon Phantom pour des vols courants.
Par contre,comme je ne me fais pas aux lunettes FPV,la réception se fera sur écran.
FPV quand même ????

Tijernas- Messages : 6
Date d'inscription : 04/12/2018
Immersion (suite)
par JPierre Lun 27 Mai - 17:32
... la suite ... Immersion-FPV
Si vous avez lu ma première contribution sur l'immersion vous avez constaté la grande simplicité du système : une caméra un émetteur !
Et cela suffit pour voler ; et puis il est arrivé ce qui devait arriver je me suis retrouvé, entraîné par le vent (et aussi peut-être parce que j'étais un peu trop haut) dans un coin que je ne reconnaissais pas.
Beaucoup de chance (et l'aide visuelle et auditive des copains présents) m'a permis de pouvoir ramener l'avion à bon port OUF !!
J'en ai tiré deux enseignements :
Le premier, je me suis mis à regarder tout ce qui se situe autour du terrain sur Maps vision satellite de façon à me familiariser avec l'environnement vu du haut ;
le deuxième, j'ai équipé mon immersion d'un GPS avec OSD afin d'avoir à tout moment, les coordonnées qui me permettront, je l'espère de savoir où "je" suis mais aussi où se trouve l'avion s'il vient à tomber ... dans un champ de maïs à maturité !!
L'osd permet aussi d'afficher la direction qu'il faut prendre pour retrouver le terrain - c'est très utile !
Je suis arrivé à faire fonctionner l'OSD grâce aux conseils éclairés et éclairants de Gilles.
Je vais essayer de respecter le plan:
A- Présentation du matériel et des logiciels indispensables
B- Réglage du BITRATE du GPS et vérification de celui-ci
C- Inscription du firmware et config de l'OSD
D- Montages soudures compléments avec petite vidéo
A- Présentation du matériel et des logiciels indispensables
Je suis parti du tutoriel de Pimousse :
https://pimousse.be/2017/01/25/osd-en-standalone-avec-gps/
... et avec le matériel qu'il a préconisé de façon à éviter les surprises pour un premier essai :
Pour le réaliser vous aurez besoin
1- d’un micro minimosd

https://fr.banggood.com/MICRO-MinimOSD-Minim-OSD-Mini-OSD-W-KV-Team-MOD-For-Naze32-Flight-Controller-p-990556.html?rmmds=myorder
2- d’un GPS

https://fr.banggood.com/Flight-Controller-GPS-with-Protective-Shell-for-PIX-PX4-Pixhawk-p-1005394.html?rmmds=myorder
3- d’un FTDI

https://fr.banggood.com/FT232RL-FTDI-USB-To-TTL-Serial-Converter-Adapter-Module-For-Arduino-p-917226.html?rmmds=myorder
4- du câble dupont
https://fr.banggood.com/40pcs-20cm-Male-To-Female-Jumper-Cable-Dupont-Wire-For-Arduino-p-973822.html?rmmds=myorder
5- éventuellement un bec/stepdown

https://fr.banggood.com/Diatone-Mini-2A-BEC-V2-0-Version-3-3V-5V-12V-For-RC-Multirotors-p-1032859.html?rmmds=myorder
Pour être complet j'ai ajouté bien sur :
6- un émetteur

https://fr.banggood.com/Eachine-TX801-5_8G-72CH-0_01MW5MW25MW50MW100MW200MW400MW600MW-Switched-AV-VTX-FPV-Transmitter-p-1147691.html?rmmds=myorder
7- une caméra

https://fr.banggood.com/RunCam-Swift-2-13-CCD-PAL-Micro-Camera-FOV-130150165-Degree-2_5mm2_3mm2_1mm-Integrated-OSD-MIC-p-1118948.html?rmmds=myorder
Remarques :
L'émetteur ci-dessus fabrique lui-même du 5V nécessaire à la caméra

Le GPS est alimenté en 3,3V donc il faut un BEC 5V vers 3,3V (pour ma part j'ai conservé le boitier mais j'ai changé les fils en les soudant directement sur la carte)


Logiciels nécessaires
Pour contrôler et éventuellement configurer le GPS : GSP Viewer ou u-Center (ver 19.04)
Pour l'OSD : Arduino IDE et MWOSD (ver1.6 gratuite) trouvé à https://github.com/ShikOfTheRa/scarab-osd/wiki/Downloads
En guise de conclusion (provisoire ou définitive ): Ce "tuto" demande un peu de travail alors j'espère que, ceux qui le liront, se manifesteront en laissant une petite trace sous forme de réponse sur le forum .
): Ce "tuto" demande un peu de travail alors j'espère que, ceux qui le liront, se manifesteront en laissant une petite trace sous forme de réponse sur le forum .
Si vous avez lu ma première contribution sur l'immersion vous avez constaté la grande simplicité du système : une caméra un émetteur !
Et cela suffit pour voler ; et puis il est arrivé ce qui devait arriver je me suis retrouvé, entraîné par le vent (et aussi peut-être parce que j'étais un peu trop haut) dans un coin que je ne reconnaissais pas.
Beaucoup de chance (et l'aide visuelle et auditive des copains présents) m'a permis de pouvoir ramener l'avion à bon port OUF !!
J'en ai tiré deux enseignements :
Le premier, je me suis mis à regarder tout ce qui se situe autour du terrain sur Maps vision satellite de façon à me familiariser avec l'environnement vu du haut ;
le deuxième, j'ai équipé mon immersion d'un GPS avec OSD afin d'avoir à tout moment, les coordonnées qui me permettront, je l'espère de savoir où "je" suis mais aussi où se trouve l'avion s'il vient à tomber ... dans un champ de maïs à maturité !!
L'osd permet aussi d'afficher la direction qu'il faut prendre pour retrouver le terrain - c'est très utile !
Je suis arrivé à faire fonctionner l'OSD grâce aux conseils éclairés et éclairants de Gilles.
Je vais essayer de respecter le plan:
A- Présentation du matériel et des logiciels indispensables
B- Réglage du BITRATE du GPS et vérification de celui-ci
C- Inscription du firmware et config de l'OSD
D- Montages soudures compléments avec petite vidéo
A- Présentation du matériel et des logiciels indispensables
Je suis parti du tutoriel de Pimousse :
https://pimousse.be/2017/01/25/osd-en-standalone-avec-gps/
... et avec le matériel qu'il a préconisé de façon à éviter les surprises pour un premier essai :
Pour le réaliser vous aurez besoin
1- d’un micro minimosd
https://fr.banggood.com/MICRO-MinimOSD-Minim-OSD-Mini-OSD-W-KV-Team-MOD-For-Naze32-Flight-Controller-p-990556.html?rmmds=myorder
2- d’un GPS
https://fr.banggood.com/Flight-Controller-GPS-with-Protective-Shell-for-PIX-PX4-Pixhawk-p-1005394.html?rmmds=myorder
3- d’un FTDI
https://fr.banggood.com/FT232RL-FTDI-USB-To-TTL-Serial-Converter-Adapter-Module-For-Arduino-p-917226.html?rmmds=myorder
4- du câble dupont
https://fr.banggood.com/40pcs-20cm-Male-To-Female-Jumper-Cable-Dupont-Wire-For-Arduino-p-973822.html?rmmds=myorder
5- éventuellement un bec/stepdown
https://fr.banggood.com/Diatone-Mini-2A-BEC-V2-0-Version-3-3V-5V-12V-For-RC-Multirotors-p-1032859.html?rmmds=myorder
Pour être complet j'ai ajouté bien sur :
6- un émetteur
https://fr.banggood.com/Eachine-TX801-5_8G-72CH-0_01MW5MW25MW50MW100MW200MW400MW600MW-Switched-AV-VTX-FPV-Transmitter-p-1147691.html?rmmds=myorder
7- une caméra
https://fr.banggood.com/RunCam-Swift-2-13-CCD-PAL-Micro-Camera-FOV-130150165-Degree-2_5mm2_3mm2_1mm-Integrated-OSD-MIC-p-1118948.html?rmmds=myorder
Remarques :
L'émetteur ci-dessus fabrique lui-même du 5V nécessaire à la caméra
Le GPS est alimenté en 3,3V donc il faut un BEC 5V vers 3,3V (pour ma part j'ai conservé le boitier mais j'ai changé les fils en les soudant directement sur la carte)
Logiciels nécessaires
Pour contrôler et éventuellement configurer le GPS : GSP Viewer ou u-Center (ver 19.04)
Pour l'OSD : Arduino IDE et MWOSD (ver1.6 gratuite) trouvé à https://github.com/ShikOfTheRa/scarab-osd/wiki/Downloads
En guise de conclusion (provisoire ou définitive
JPierre- Messages : 13
Date d'inscription : 04/12/2018
Re: Immersion - Fpv - Émetteurs - Antennes etc
par fouduciel Mar 28 Mai - 9:45
mon petit Jean Pierre,
louons le père Noël 
dommage que les solutions "bangood" ne soit pas en numérique,
tu sais que j'avais monté ce système,mais très déçu par la qualité de transmission ,je suis passé au Disco
a plus sur le terrain
louons le père Noël
dommage que les solutions "bangood" ne soit pas en numérique,
tu sais que j'avais monté ce système,mais très déçu par la qualité de transmission ,je suis passé au Disco
a plus sur le terrain

fouduciel- Messages : 4
Date d'inscription : 28/05/2019
Re: Immersion - Fpv - Émetteurs - Antennes etc
par JPierre Mar 28 Mai - 10:27
Très cher fouduciel merci d'avoir parcouru ce forum.
Il faudra que je te montre une vidéo pour que tu constates que l'on peut facilement piloter (le but étant là je crois ) en immersion ; je pense que si l'on veut une excellente qualité d'image il faut que l'enregistrement se fasse directement dans le modèle (sans transmission) ... je crois que Robert fait comme cela.
Et puis Banggood et toute la Chine évolue très vite on aura bientôt de la transmission numérique à pas cher
Aplus chez Mary
Il faudra que je te montre une vidéo pour que tu constates que l'on peut facilement piloter (le but étant là je crois ) en immersion ; je pense que si l'on veut une excellente qualité d'image il faut que l'enregistrement se fasse directement dans le modèle (sans transmission) ... je crois que Robert fait comme cela.
Et puis Banggood et toute la Chine évolue très vite on aura bientôt de la transmission numérique à pas cher
Aplus chez Mary
JPierre- Messages : 13
Date d'inscription : 04/12/2018
Re: Immersion - Fpv - Émetteurs - Antennes etc
par JPierre Jeu 30 Mai - 12:21
... la suite 2 ... Immersion-FPV
B- Réglage du BITRATE du GPS et vérification de celui-ci
Un point capital est la vitesse de transmission du GPS vers l'OSD.
Si la vitesse de transmission n'est pas la bonne (c'est à dire le même BITRATE pour l'OSD et pour le GPS) ils sont incapables de se comprendre ce qui signifie pour nous "pas d'affichage".
Un petit point de traduction et de définition :
BIT RATE signifie débit binaire
BAUD RATE signifie vitesse de transmission (nombre de symboles par seconde)
(Ne me demandez pas pourquoi j'ai choisi un baurate de 38400 c'est un peu par hasard car mon GPS était à l'origine réglé comme cela!)
On fait donc le petit montage GPS-->FTDI-->USB du PC sur lequel sont installés les programmes GPS-Viewer et U-Center.
Attention tout de même aux branchements
Les bornes DTS et CTS du FTDI ne sont pas reliées
Les deux cables TX et RX sont croisés entre GPS et FTDI

L'alimentation du GPS se fait à travers le BEC :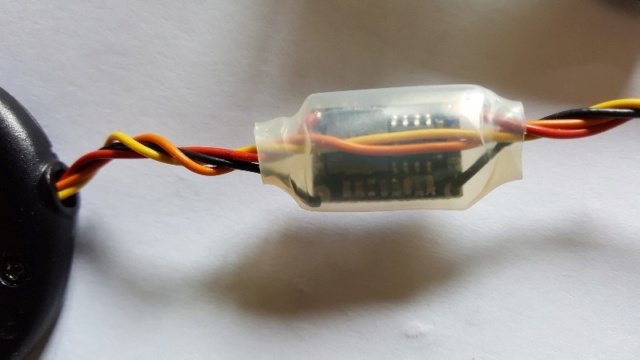
Une led rouge doit s'allumer sur le FTDI et une led s'allume sur le GPS puis clignote s'il reçoit les signaux de plusieurs satellites.
Vérification du fonctionnement du GPS
Le branchement ci-dessus étant effectué on lance le programme GPS-Viewer
On choisi le port COM (pour moi le COM4)

On choisit le baudrate (pour moi 38400)
Puis Close/connect
A ce moment si vous avez une fenêtre "Failed to open Port X" déconnectez vous et changez le port com puis reconnecter
Si vous voyez défiler des valeurs le port choisi est le bon.
Si chaque ligne qui défile commence par $GN... vous avez le bon débit ; sinon vous avez une suite de signes incohérents !! il suffit se déconnecter changer le baudrate et se reconnecter.
Changer le bautrate du GPS
Cette opération n'est pas indispensable car on peut utiliser celui qui a été trouvé ci-dessus Voir chapitre C.
Mais pour ceux qui le voudraient on peut faire comme cela (méthode mise au point par Gilles) :
Brancher en USB (voir ci-dessus)
Lancer le programme U-center(ver19.04) connexion (éventuellement retoucher Baudrate et Com)
Menu View/Text control : on voit défiler les données ...

View/Message view/UBX (double clic)/CFG(double clic)/PRT
Changer le BAUDRATE pour la valeur souhaitée
Send

View/Message view/UBX (double clic)/CFG(double clic)/CFG
Send
En principe c'est fait il n'y a plus qu'à vérifier !
Dans le prochain épisode on s'attaquera à la programmation de l'OSD !!
B- Réglage du BITRATE du GPS et vérification de celui-ci
Un point capital est la vitesse de transmission du GPS vers l'OSD.
Si la vitesse de transmission n'est pas la bonne (c'est à dire le même BITRATE pour l'OSD et pour le GPS) ils sont incapables de se comprendre ce qui signifie pour nous "pas d'affichage".
Un petit point de traduction et de définition :
BIT RATE signifie débit binaire
BAUD RATE signifie vitesse de transmission (nombre de symboles par seconde)
(Ne me demandez pas pourquoi j'ai choisi un baurate de 38400 c'est un peu par hasard car mon GPS était à l'origine réglé comme cela!)
On fait donc le petit montage GPS-->FTDI-->USB du PC sur lequel sont installés les programmes GPS-Viewer et U-Center.
Attention tout de même aux branchements
Les bornes DTS et CTS du FTDI ne sont pas reliées
Les deux cables TX et RX sont croisés entre GPS et FTDI
L'alimentation du GPS se fait à travers le BEC :
Une led rouge doit s'allumer sur le FTDI et une led s'allume sur le GPS puis clignote s'il reçoit les signaux de plusieurs satellites.
Vérification du fonctionnement du GPS
Le branchement ci-dessus étant effectué on lance le programme GPS-Viewer
On choisi le port COM (pour moi le COM4)
On choisit le baudrate (pour moi 38400)
Puis Close/connect
A ce moment si vous avez une fenêtre "Failed to open Port X" déconnectez vous et changez le port com puis reconnecter
Si vous voyez défiler des valeurs le port choisi est le bon.
Si chaque ligne qui défile commence par $GN... vous avez le bon débit ; sinon vous avez une suite de signes incohérents !! il suffit se déconnecter changer le baudrate et se reconnecter.
Changer le bautrate du GPS
Cette opération n'est pas indispensable car on peut utiliser celui qui a été trouvé ci-dessus Voir chapitre C.
Mais pour ceux qui le voudraient on peut faire comme cela (méthode mise au point par Gilles) :
Brancher en USB (voir ci-dessus)
Lancer le programme U-center(ver19.04) connexion (éventuellement retoucher Baudrate et Com)
Menu View/Text control : on voit défiler les données ...
View/Message view/UBX (double clic)/CFG(double clic)/PRT
Changer le BAUDRATE pour la valeur souhaitée
Send
View/Message view/UBX (double clic)/CFG(double clic)/CFG
Send
En principe c'est fait il n'y a plus qu'à vérifier !
Dans le prochain épisode on s'attaquera à la programmation de l'OSD !!
JPierre- Messages : 13
Date d'inscription : 04/12/2018
Re: Immersion - Fpv - Émetteurs - Antennes etc
par fouduciel Jeu 30 Mai - 19:16
BIT & RATE signifie débit binaire 
j'ai eu peur ! avec ces termes médicaux !
toujours est il , que ton sujet est excellent ! bravo
j'ai eu peur ! avec ces termes médicaux !
toujours est il , que ton sujet est excellent ! bravo
fouduciel- Messages : 4
Date d'inscription : 28/05/2019
Re: Immersion - Fpv - Émetteurs - Antennes etc
par JPierre Mar 11 Juin - 13:35
C- Inscription du firmware et config de l'OSD
Voici le chapitre que vous attendez tous ...
(Je mettrai en annexe tous les mails des lecteurs enthousiastes qui m'ont imploré de publier rapidement la suite ... euh ... si j'en reçois ... )
Donc voici la partie programmation de l'OSD qui, comme le titre le dévoile, est faite en 2 parties :
1- Inscription du firmware :
Et d'abord qu'est-ce que le firmware ? et bien c'est un petit fichier arduino MW_OSD.ino que vous trouverez dans le réperoire MW_OSD .
Pour ouvrir, et modifier, ce fichier il faut que le programme Arduino IDE soit installé sur votre PC : vous le trouverez là https://www.arduino.cc/en/Main/Software
Le programme MW_OSD est fait pour utiliser différents arduinos, différents GPS, des drones ou avions, et même différentes vitesse de transmission (voir B- ci-dessus) ; il est donc nécessaire de l'adapter à votre matériel :
Donc vous cliquez sur MW_OSD.ino normalement l'éditeur de texte s'ouvre et vous allez pouvoir faire les modifications suivantes dans l'onglet config.h :
Ligne 16 enlever "//" devant #define MINIMOSD (rétablir "//" pour les autres)

Ligne 55 enlever "//" devant #define GPSOSD_UBLOX (Idem)
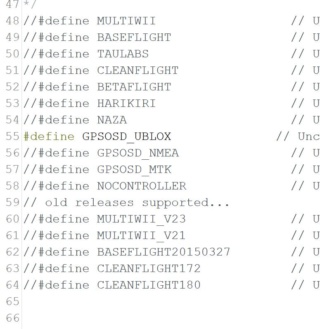
Ligne 71 enlever "//" devant #define FIXEDWING (rétablir "//" pour l'autre)
Ligne 131 enlever "//" devant la ligne qui correspond à votre GPS (voir image plus bas)
Aller dans Outils /Type de Carte/ Arduino Pro ou Pro Mini
Aller dans Outils/Processeur/ ATmega 328P 5V 16 MHz
Cela étant fait vous n'avez pas à modifier autre chose dans le programme car le configurateur du 2°) fait du bon travail
Il ne reste plus qu'à téléverser le firmware dans le MINIMOSD; le branchement du MINIMOSD se fait en USB bien sur à travers le FTDI -- sans fils croisés --



Clic sur Téléverser , le FTDI signale par le clignotement de 2 leds que le message transite. L'extinction indique la fin du téléversement et s'il n'y a pas de message d'erreur tout est OK !
2- Configuration
Il existe 2 grandes versions du configurateur :
- la 1.6 gratuite peut-être un peu compliquée
- la 1.9 payante (modestement... dans les 3€ je crois) plus simple d'utilisation et évite aussi la partie 1°) ci-dessus.
J'ai choisi la 1.6 parce que on doit tous en baver !! non tout simplement car il est plus facile de modifier les fonts.
Faire le même montage que dans le 1°- OSD-FTDI-USB-PC
Lancer le configurateur MW_OSD GUI. Comme tout programme il y a un certain apprentissage nécessaire et je n'ai pas la prétention, loin de là, d'en connaitre toutes les ficelles qui sont nombreuses. Voici la saisie d'écran d'une de mes configurations qui marche bien à mon goût.

Le points importants sont :
*La colonne de gauche : régler com setting ici 38400
Commuter : ici COM4
*Main Voltage : Le 214 est le coefficient permettant d'afficher la même tension que celle mesurée au voltmètre sur la batterie. (Maîtrise de la règle de 3 indispensable.)
*Un autre point important est le Layout Editor

Lancement 1
Passer d'une occurence à la suivante 2
Faire apparaitre/disparaitre 3
Déplacer l'affichage 4
Enregistrer sur l'OSD 5
Choisir la font :
FONT TOOLS/SELECT : choisir sa font
Ne pas oublier de l'enregistrer sur l'OSD : UPLOAD
(On peut aussi modifier les fonts ... on en parlera plus tard !)
Mémoriser la config sur le PC : SAVE
Terminer avec WRITE
Déconnecter, débrancher l'USB, brancher le GPS et Hop !!

Et voici pour terminer la photo du montage final hormis la caméra qui n'est pas une RUNCAM (montée sur l'avion)


N.B.
Une petite note en fin d'article étant du plus bel effet sur le lecteur j'ajoute que j'ai acheté et essayé un petit GPS :
https://www.banggood.com/Beitian-Smallest-Mini-Dual-GLONASSGPS-BN-180-Micro-Double-GPS-Antenna-Module-UART-TTL-For-CC3D-F3-RC-Drone-Airplane-p-1208587.html?rmmds=search&cur_warehouse=CN

Résultats : Son fonctionnement est parfait
Comparé au GPS décrit plus haut dans le tuto il semble que son démarrage soit un peu plus lent et que le nombre de satellites trouvés un peu moindre ... mais bon ! vu le prix !
Bon j'attends vos commentaires, vos ajouts etc ...

JPierre- Messages : 13
Date d'inscription : 04/12/2018
fouduciel- Messages : 4
Date d'inscription : 28/05/2019
Re: Immersion - Fpv - Émetteurs - Antennes etc
par JPierre Dim 30 Juin - 18:03
Immersion encore une suite !!
Et bien voilà je poste une petite vidéo (pas trop longue)
(Pas de son et la vidéo n'est pas de très bonne qualité, j'ai été obligé de compresser)
C'est le résultat de tout ce qui est ci-dessus :
Vous y verrez
l'affichage des coordonnées,
le nombre de satellites reçus,
la distance et la direction au point de départ,
l'altitude (parfois un peu bizarre : on y travaille)
la tension de la batterie,
la vitesse et la durée
Il y a encore des améliorations à faire !
Admirez aussi le bel envol et le non moins superbe atterrissage !
Et bien voilà je poste une petite vidéo (pas trop longue)
(Pas de son et la vidéo n'est pas de très bonne qualité, j'ai été obligé de compresser)
C'est le résultat de tout ce qui est ci-dessus :
Vous y verrez
l'affichage des coordonnées,
le nombre de satellites reçus,
la distance et la direction au point de départ,
l'altitude (parfois un peu bizarre : on y travaille)
la tension de la batterie,
la vitesse et la durée
Il y a encore des améliorations à faire !
Admirez aussi le bel envol et le non moins superbe atterrissage !
JPierre- Messages : 13
Date d'inscription : 04/12/2018
Visitez aussi notre site: https://aathiers.jimdofree.com :: Au sommet :: Technique,Electronique,Montages,Astuces
Page 1 sur 1
Permission de ce forum:
Vous ne pouvez pas répondre aux sujets dans ce forum|
|
|